
 Franck, INTITEK-TMA Electronic Engineer, explains the fundamental principal of LIN protocol in the last generation alternator regulators.
Franck, INTITEK-TMA Electronic Engineer, explains the fundamental principal of LIN protocol in the last generation alternator regulators.
With the increase of embedded systems in vehicles, it has become imperative to use a network enabling them to communicate with the on-board computer.
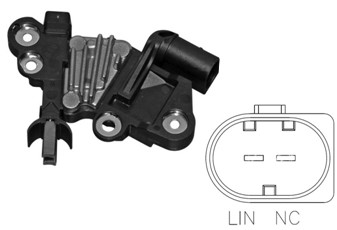
In the case of the last generations of alternators, the regulators use LIN protocol whose communication is bidirectional. That means that the on-board computer talks to the alternator which answers to it.
This is for example the case of ONYX and TITANE test benches which totally simulate the on-board computer functionalities. They are able to drive the Lin alternator, get a feedback of its information, and report all details on a ticket.
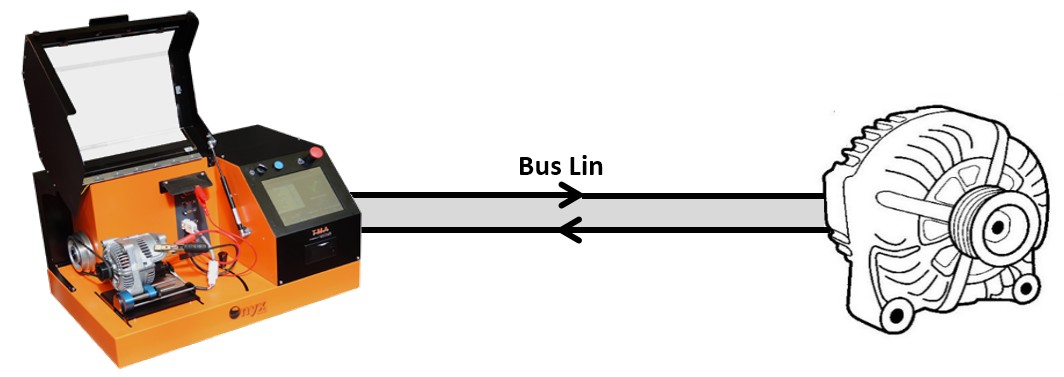
Connection ONYX / Lin Alternator
But, what is LIN Protocol?
The Lin protocol (Local Interconnect Network) is a serial system bus used mainly in automotive industry meeting the standard ISO-17987. This is a reliable and economical communication protocol allowing vehicle’s on-board computer to converse with its subsystems.
 There are 2 main LIN families: LIN1 and LIN2. They are essentially differentiated by the way their messages are encoded. Those two families can generally run under two transfer speeds: 9600 or 19200 bauds.
There are 2 main LIN families: LIN1 and LIN2. They are essentially differentiated by the way their messages are encoded. Those two families can generally run under two transfer speeds: 9600 or 19200 bauds.
Inside LIN protocol, we find five types (1, 2, 3, 4 and 5) each having five different versions (a, b, c, d and e). Those variants allow to systems to identify, send a feedback of issues and information or to be drove.
A communication using LIN protocol is composed of a sequence of frames representing a specific message, for example, the identification of the alternator or its diagnostic.
Example of dialogue with 2 frames :
| Identification frame | Diagnostic frame |
| Examples: regulator Id, alternator brand… | Examples: breakdown, measurement… |
Each frame contains information or parameters coming from the alternator or vehicle calculator. Below, examples of a diagnostic frame:
Example of a diagnostic frame for a regulator with Lin 1 Type 1 version b frame
| 1st byte | 2nd byte | 3rd byte | 4th byte | ||||||||
| A | B | C | D | E | F | G | - | H | I | J | K |
A : Overheat B : Electrical failure C : Mechanical failure D : Excitation signal | E : Excitation current | F : LIN latency G : LIN error H : Load ramp I : Excitation control J : Information on 4th byte | K : Voltage regulation or speed or … |
During a communication with an alternator, the car computer can :
| Ask some information | Get breakdwon | Set parameters |
| o Brand and model of the alternator o Brand and model of the regulator o Rotation speed o Excitation current o Temperature | o Mechanical o Electrical o Overheat | o Voltage regulation o Response time o Default mode (LIN breakdown) |